Runtime of
BFS
Runtime: {{c1::\( \mathcal{O}(|E| + |V|) \)}}
Approach:
Uses:
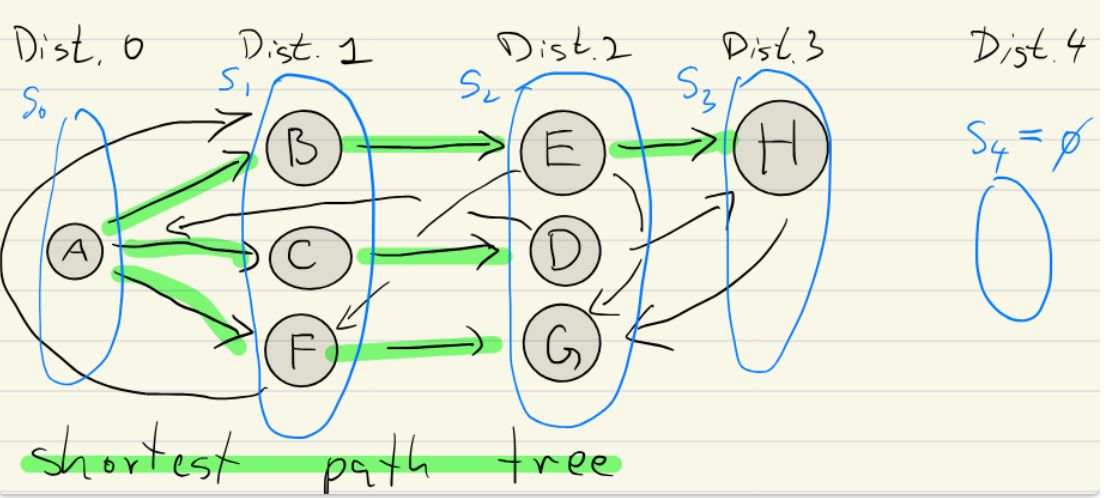
?The runtime of BFS:
- each loop we take \(O(1 + \deg(u))\) time (go through the vertex \(u\)'s edges
- We loop a total of \(|V|\) times (we visit each edge max. 1 time)